# 稳定性分析
Table of Contents
前篇[[开环,闭环系统]] 稳定性,是一个系统的基础。只有在一个稳定的系统上,才会有系统的瞬态分析,稳态误差分析,控制,优化等等。
稳定的定义
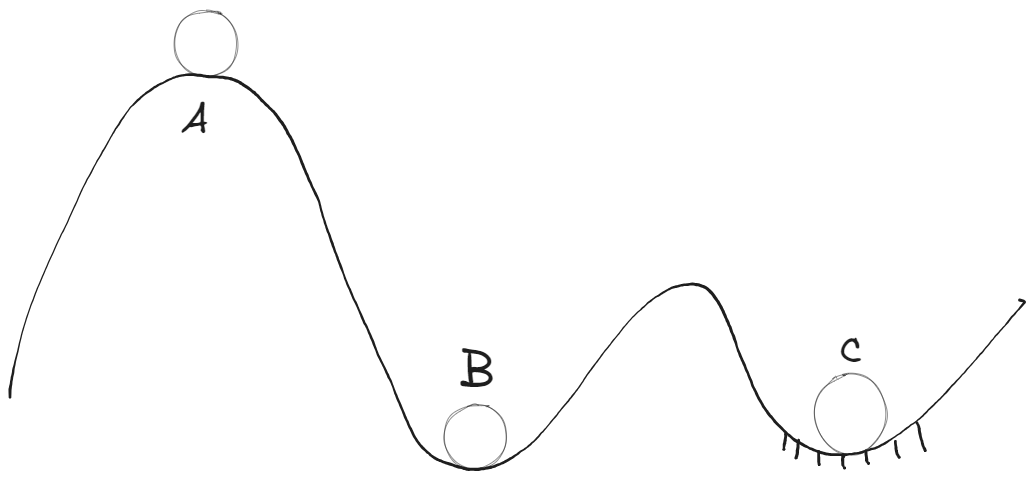 依旧以一个例子开始,假设有一段这样的轨道,有 A,B,C 三个位置,其中 A,B 两点光滑,C 点处有摩擦。在这三个点各方一个小球,那么这三个小球都是可以保持静止不动的,用数学的语言来表达,就是
依旧以一个例子开始,假设有一段这样的轨道,有 A,B,C 三个位置,其中 A,B 两点光滑,C 点处有摩擦。在这三个点各方一个小球,那么这三个小球都是可以保持静止不动的,用数学的语言来表达,就是
即位移 x 对于时间 t 的导数为 0(即小球的速度等于 0),也就是他的位置不随时间变化。那么这三个点,我们就称之为平衡点 (Equilibrium Point) 。
那么不稳定的情况呢?
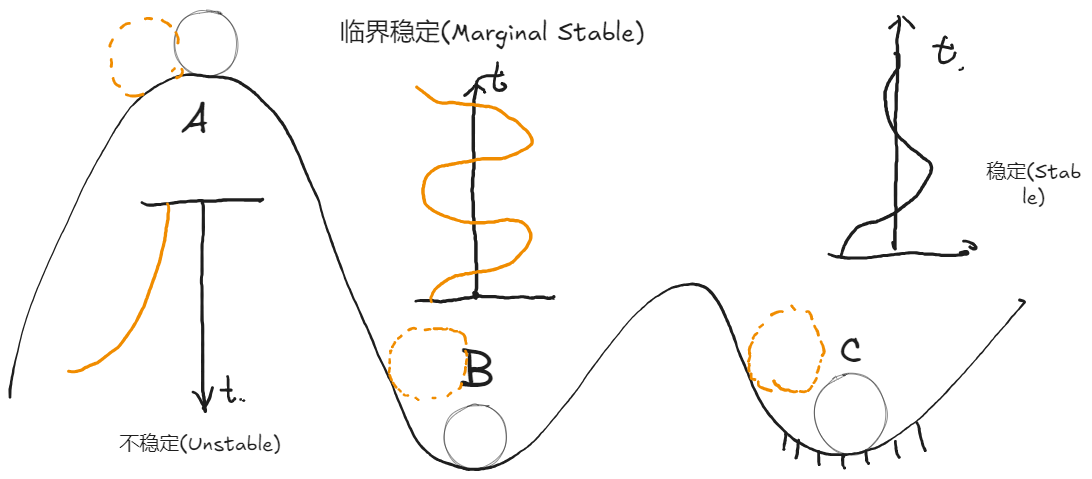 依旧是上面的例子,但是我们做出一点改变:将三个小球都在橙色位置释放,对于 A 小球,他就会一直走下去,随着时间的增加越走越远;对于 B 小球,因为 B 处没有摩擦力,那么 B 小球就会一直在凹糟处做简谐运动;对于 C 小球,因为摩擦力的存在,他来回运动的幅度会越来越小,最后静止在 C 点。对于这三种情况,我们一次称他为不稳定 (Unstable),临界稳定 (Marginal Stable),稳定 (Stable) 。用数学的语言来表达呢,就是:
依旧是上面的例子,但是我们做出一点改变:将三个小球都在橙色位置释放,对于 A 小球,他就会一直走下去,随着时间的增加越走越远;对于 B 小球,因为 B 处没有摩擦力,那么 B 小球就会一直在凹糟处做简谐运动;对于 C 小球,因为摩擦力的存在,他来回运动的幅度会越来越小,最后静止在 C 点。对于这三种情况,我们一次称他为不稳定 (Unstable),临界稳定 (Marginal Stable),稳定 (Stable) 。用数学的语言来表达呢,就是:
在经典控制理论中,我们讨论的一般都是系统的稳定性,我们也可以把上面的图看成系统。例如我们对于 B 来说:B 系统处于一个临界稳定的状态,既然是系统,就要考虑到系统的输入。如果我们对这个系统施加一个输入,比如踢一下这个小球,如果我们是假的这个力不够大的话,那么 B 小球最后还是会在凹槽左右做简谐运动。也就是说,如果我们的输入是有界的,那么系统的输出也是有界的。这就是BIBO 稳定 (Bounded Input - Bounded Output) 。生活中,比如体感平衡车就是这种稳定系统:如果我们前倾,那么车就会向前移动。如果前倾的幅度过大,你就会扑街。
对于学习控制理论,我们一定要明确稳定性分析的对象。因为同样的系统可能会存在多个平衡点。我们以一个单摆为例。
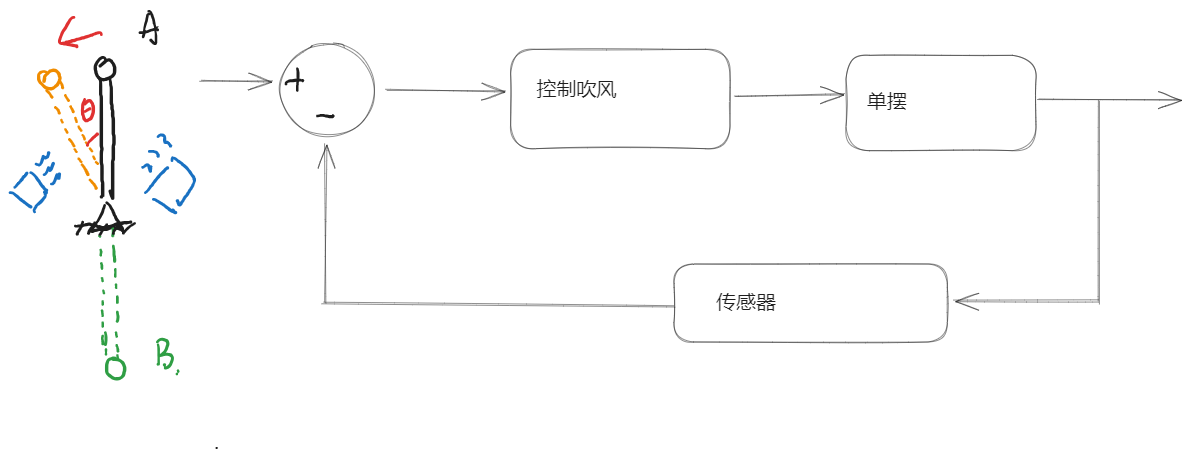 对于这个单摆来说,他有两个平衡位置 A,B。对于 B 来说,他是一个稳定的平衡点,因为当单摆偏离了这个点,他最后会自己摆回来。而 A 点并不是,当你最开始摆在 A 点时,他会保持静止不动,但当他偏离这个位置,在没有外力的作用下,他就回不来了。如果我们希望他在上面也能保持住的话,我们可以在单摆的两侧各装一个吹风机。而吹风机就根据单摆偏离的角度,来调整吹风机的吹风量,这样就形成了一个反馈系统。
对于这个单摆来说,他有两个平衡位置 A,B。对于 B 来说,他是一个稳定的平衡点,因为当单摆偏离了这个点,他最后会自己摆回来。而 A 点并不是,当你最开始摆在 A 点时,他会保持静止不动,但当他偏离这个位置,在没有外力的作用下,他就回不来了。如果我们希望他在上面也能保持住的话,我们可以在单摆的两侧各装一个吹风机。而吹风机就根据单摆偏离的角度,来调整吹风机的吹风量,这样就形成了一个反馈系统。